Покорение морских глубин
Во всех прибрежных странах на протяжении истории их развития имеются те или иные доказательства попыток проникновения человека в поверхностные воды морей и океанов. Однако естественно, что дальше, чем на глубину нескольких десятков метров, без специального снаряжения опуститься в подавляющем большинстве случаев никому не удавалось. Известно, что вода значительно плотнее воздуха и давление водной среды во много раз превышает атмосферное. Организм человека рассчитан на давление окружающей среды, равное 1 кгс/см2 или одной атмосфере, что соответствует давлению воздуха на уровне моря. При погружении в воду на глубину 10 м давление, воздействующее на человека, возрастает на 1 атм. На глубине 40 м давление воды возрастает на 60 т по сравнению с давлением, которое испытывает тело человека на уровне моря. Легкие же здорового человека позволяют сделать несколько вдохов при увеличении давления лишь на 1/ 5 атмосферы, а при дальнейшем увеличении давления попытка дышать под водой приводит к травме легких. Поэтому с давних пор люди искали способ получить необходимый для дыхания под водой воздух.
В записных книжках Леонардо да Винчи, датируемых примерно 1500 г., имеется несколько набросков гипотетических дыхательных аппаратов, один из которых представляет собой даже водолазный костюм.
В дальнейшем на протяжении более чем 400-летней истории в Италии, Франции, Германии, Англии и США предпринимались попытки изобрести водолазный скафандр, с которым можно было бы безопасно погружаться хотя бы на глубину 50—100 м. Но многочисленные модели водолазных костюмов, которые появлялись в эти годы, не отвечали основному требованию — безопасности человека, погружавшегося на глубину.
Первый пригодный для практического использования глубоководный водолазный скафандр был выпущен в Германии в 1923 г. и прошел успешные испытания на глубине 152 м.
Этот жесткий водолазный скафандр впервые относительно удовлетворял двум основным требованиям. Во-первых, он имел баллоны с шестичасовым запасом сжатого воздуха, а, во-вторых, конструкция скафандра давала возможность водолазу передвигаться и выполнять необходи мую работу в ограниченных пределах. Огромная масса скафандра (385 кг), ограниченность свободы маневрирования в нем и ряд других недостатков в дальнейших моделях пытались устранить. Тем не менее полностью добиться этого не удалось и до наших дней.
Одновременно с попытками изобрести жесткий водолазный костюм шли работы и в другом направлении. Так, в 1829 г. русский изобретатель Гаузен предложил водолазный костюм, который явился прототипом современного мягкого водолазного скафандра. Он состоял из медного шлема, крепившегося на плечах водолаза металлической шиной, а также рубахи из непромокаемой ткани. Скафандр был вентилируемым: воздух для дыхания подавался через гибкий шланг ручным насосом, а избыток возду ха выходил из-под шлема. В дальнейшем этот водолазный костюм был несколько видоизменен англичанином Августом Зибе (соединение шлема с рубахой делалось герме тическим), после чего этот мягкий скафандр нашел при менение на всех флотах мира.
Изобретение водолазного костюма — огромный качественный скачок в стремлении человека проникнуть в морские глубины. Подъем сокровищ с затонувших кораблей, подъем самих затонувших судов, ремонт подводных частей судов и многие другие виды очень полезных и необходимых работ стали возможны с созданием водолазного скафандра.
Однако при всех достоинствах современного водолазного костюма ему присущи и серьезные недостатки. Это прежде всего очень тяжелое громоздкое снаряжение, а отсюда и малая маневренность водолаза при подводных работах. Во-вторых, несовершенство конструкции резинового шланга, по которому подается водолазу воздух. История водолазного дела сохранила немало трагических случаев гибели водолазов из-за обрыва или перегиба шланга, просто из-за того, что шланг запутался в обломках судна или подводных скалах.
Страшный враг водолаза — так называемая кессонная болезнь. Известно, что с увеличением глубины погружения увеличивается и количество воздуха, вдыхаемого водолазом за один вдох. Одновременно с этим увеличивается растворимость воздуха в крови. Чем больше глубина, тем больше воздуха растворяется в крови. При этом кислород расходуется в организме, а азот быстро в нем накапливается в значительно больших количествах, чем может содержаться в крови и тканях. Пока человек находится под водой, поведение азота напоминает поведение газа в закупоренной бутылке с лимонадом. Будучи под давлением, он ничем не обнаруживает своего присутствия. Но стоит водолазу быстро подняться на поверхность, как его организм приобретает нежелательное сходство с рас купоренной бутылкой шипучего напитка.
Как из лимонада начинает бурно выделяться газ, так и из крови — растворенный в ней азот. Крупные пузырьки азота могут закупорить кровеносные сосуды и нарушить кровообращение отдельных частей организма, привести к растяжению и разрыву мелких кровеносных сосудов, а в отдельных случаях к параличу конечностей или отдельных частей тела. Иногда наблюдается и смертельный исход.
Но если водолаза поднимать на поверхность медленно с остановками, то также медленно, постепенно будет выделяться из его организма избыточный азот. В этом случае он не причинит человеку никакого вреда. Такой медленный подъем и связанное с ним постепенное понижение давления называется декомпрессией. Иногда время декомпрессии затягивается на несколько часов. Легко представить себе самочувствие водолаза, неподвижно висящего в толще воды.
С изобретением подводного лифта положение изменилось. Лифт имеет снизу люк и подвешивается к лебедке или крану, находящемуся на борту водолазного судна. Водолаз, закончив работу, входит в лифт и пока он медленно поднимается, человек проходит декомпрессию находясь в сухом помещении. Но вредное действие азота не ограничивается только кессонной болезнью. Уже начиная с глубины 30—50 м он действует как наркотик, и водолаз подвергается глубинному «опьянению».
Глубинное «опьянение» стало серьезным препятствием в освоении глубин. Чтобы избежать его, были предложены искусственные дыхательные смеси, лучшей из которых оказалась та, где азот был заменен инертным газом — гелием. Первые же погружения с применением гелиокислородных дыхательных смесей дали возможность достичь значительно больших глубин. Еще в 1939 г. советские водолазы Леонид Кобзарь и Павел Выгулярный спустились на невиданную тогда глубину 157 м. В начале 1948 г. опять-таки советские водолазы И. Выскребенцев и Б. Иванов первыми в мире достигли 200-метровой глубины, а в 1956 г. тоже советские водолазы Д. Лимбенс, В. Шалаев и В. Курочкин первыми покорили и 300-метровую глубину. Лишь 6 лет спустя профессор математики из Цюриха Ганс Келлер достиг глубины 305 м. При этом погружении погиб его товарищ английский журналист Питер Смолл. Однако это были одиночные погружения которые в первую очередь преследовали цель — выяснить возможности человеческого организма и отработать некоторые конструктивные особенности водолазного снаряжения. Вести какие-либо работы на таких глубинах и особенно в более удобных мягких костюмах практически невозможно. В связи с этим усилия ученых были направлены на то, чтобы, во-первых, создать такое безопасное снаряжение, которое бы позволило увеличить глубину погружения без вреда для здоровья человека; и, во-вторых, найти средство, которое давало бы человеку возможность свободно передвигаться на глубине, независимо от подачи воздуха с поверхности. Избавление от шлангов подачи воздуха, безусловно, позволило бы человеку передвигаться под водой с большей безопасностью для жизни. Такой аппарат был изобретен в 1943 г. знаменитым французским исследователем глубин Жаком Ив Кусто и французским инженером Эмилем Ганьяном. Акваланг, или, как его чаще называют, «подводные легкие», позволил, наконец, избавиться от шланга, десятилетиями сковывающего водолаза в скафандре, и дал возможность человеку передвигаться под водой подобно рыбе. Трудно переоценить это изобретение, открывшее новые небывалые возможности исследования морских глубин. Акваланг состоит из маски, двух баллонов со сжатым воздухом (они соединены воздушными шлангами с загубником, через который подается воздух в легкие водолаза именно под тем давлением, какое имеет окружающая среда) и резиновых ласт. Легкий резиновый гидрокостюм и резиновые сапоги дополняют снаряжение аквалангиста.
Два баллона со сжатым воздухом позволяют находиться на глубине 10 м 50 мин, на глубине 30 м 25 мин, на глубине 70 м — 12 мин. С изобретением акваланга практически каждый человек после двух-трех уроков может погрузиться на глубину до 15 м, а после несколько более тщательной подготовки и на глубину до 40 м. Подводный мир во всем своем многообразии верхнего слоя может наблюдать любой любознательный человек.
Параллельно с работами по созданию акваланга, после того как выяснились ограниченные возможности тяжелых водолазных скафандров, для проникновения в морские глубины начали использовать наблюдательные камеры. Они представляли собой вертикальные стальные цилиндры, снабженные множеством иллюминаторов, запасом дыхательной смеси и телефонной связью с поверхностью. Такие наблюдательные камеры опускались на тросе с надводного судна, и использование их стало возможным только с появлением автономного устройства для регенерации (возобновления) воздуха и источников света, позволяющих вести наблюдения на больших глубинах. Наблюдательные камеры явились ступенью для создания первой батисферы американских ученых Уильяма Биби и Отиса Бартона. Она представляла собой полый стальной шар диаметром около 2 м и массой 2,5 т. В иллюминаторы были вставлены кварцевые стекла толщиной 7,5 см. Батисфера имела запас кислорода на двух человек ига 8 ч и регенерационный аппарат для восстановления «отработанного» воздуха.
Первое погружение в ней было совершено в 1930 г. на глубину в 244 м, тем самым побив все рекорды предыдущих погружений наблюдательных камер. А через 4 года Биби и Бартон совершили в батисфере рекордное погружение до глубины 925 м. Этот рекорд продержался 15 лет, пока Бартон в 1949 г. не опустился на глубину 1375 м, и эта глубина остается мировым рекордом для аппарата, подвешенного на тросе. Благодаря рассказам и публикациям Биби, бывшего страстным пропагандистом освоения глубин, открылось много новой увлекательной информации о животном и растительном мире морских глубин.
Погружения Биби и Бартона, однако, были единичными погружениями энтузиастов-ученых и практически не имели большого значения для науки. И такие погружения были немногочисленными, потому что первые глубоководные аппараты, включая и батисферу Биби — Бартона, не могли самостоятельно всплыть. Каждое такое погружение было связано с огромным риском для жизни исследователей.
Современные гидростаты (т. е. подводные аппараты цилиндрической формы), используемые учеными разных специальностей во многих странах мира, предназначены для планомерного изучения подводного мира. Риск при погружении в них сведен к минимуму. В случае аварии, вызванной обрывом троса, гидростат всплывает самостоятельно.
Если первые батисферы были оборудованы лишь прожекторами и приборами для фиксации достигнутой глубины, то современный гидростат представляет плавучую лабораторию, снабженную множеством электрических и гидравлических приборов.
Он оборудован фото-, кино- и телевизионными установками и прожекторами, а часто и манипуляторами (механическими руками), способными производить очень важные и полезные операции. Из гидростатов, построенных в СССР и эксплуатирующихся в основном учеными, занимающимися вопросами морского рыбного хозяйства, надо отметить гидростат «ГКВ-6», а также «Север-1» и «Атлант-1».
Первый из них, построенный еще в 1944 г., много и с большой пользой послужил в Баренцевом море ученым Полярного научно-исследовательского института рыбного хозяйства и океанографии. Одноместный гидростат, напоминавший форму груши, многократно опускался до глубины 70 м, на которой днем -можно работать без искусственного освещения. С помощью гидростата «ГКВ-6» ученые получили много интересных сведений о жизни рыб, их повадках, реакции на световые и шумовые раздражители, особенностях размножения и т. п.
В 1960 г. на смену «ГКВ-6» пришел новый более усовершенствованный гидростат «Севср-1». Он также имел цилиндрическую форму, но был рассчитан на глубину погружения до 600 м. На гидростате размещался один наблюдатель, сидящий на вращающемся вокруг пяти иллюминаторов стуле. Гидростат оснащен дистанционно-управляемыми сильными прожекторами и лампой-вспышкой для фотографирования, а также регенератором воздуха для поглощения углекислоты и выделения кислорода, рассчитанным на работу в течение 6 ч. «Север-1» оборудован также киноаппаратом и другими необходимыми приборами. На случай аварии гидростат имеет систему аварийного всплытия, основанную на сбросе аварийного груза, после чего аппарат приобретает дополнительную плавучесть. Гидростат легко буксируется на тросе в любой нужный район акватории.
«Атлант-1», появившийся в 1963 г., представляет собой подводный планер с крыльями и хорошо обтекаемым легким корпусом. Это гидростат, буксируемый за судном под водой. «Атлант-1» имеет горизонтальные рули, с помощью которых пилот-наблюдатель регулирует глубину погружения. Гидростат легко сам всплывает на поверхность, для чего судну, с которым он связан кабельным тросом, достаточно сбавить ход. По кабельному тросу подается электроэнергия и осуществляется телефонная связь. Аппарат рассчитан на глубину погружения 100 м и предназначен для наблюдения за работой трала. С помощью киноаппарата обычно снимается на пленку весь процесс работы трала и поведение рыб. «Атлант-1» получил международное признание и экспонировался на нескольких международных выставках. В настоящее время ему на смену пришел новый гидростат «Атлант-2».
Батисферы, гидростаты и другие подводные аппараты, связанные с наводным судном кабельным тросом, сыграли в свое время большую роль в исследовании морских глубин и до некоторой степени не потеряли свое значение и сейчас. Однако относительно небольшой предел погружения и «привязанность» к надводному судну, с одной стороны, и узкая целенаправленность применения их, с другой стороны, привели к тому, что на смену им пришли более глубоководные автономные (т. е. не связанные с надводным судном) аппараты, способные самостоятельно выполнять любые исследовательские работы.
Созданию глубоководных автономных подводных аппаратов в 60—70-е гг. способствовал и ряд других обстоятельств. Именно в этот период развернулись обширные работы по поискам и добыче подводных месторождений нефти и газа, твердых полезных ископаемых, развитию марикультуры во многих странах. Начинает применяться разнообразная подводная техника: морские буровые платформы, нефтехранилища, плавучие заводы для сжижения газа и переработки нефти и т.п. Развитие морской промышленности и вызывает необходимость создания новых автономных подводных аппаратов для проведения человеком работ на глубине 100 м и более. Так, только для обслуживания нефтепромыслов в Северном море используется одновременно более 20 глубоководных обитаемых аппаратов. Они применяются при укладке нефтегазопроводов на дне моря и при их ремонте, а также при монтаже буровых платформ и контроле за работой буровых скважин.
Если учесть, что в последние годы открыто много новых морских месторождений нефти на глубинах свыше 1000 м и наиболее выгодно с экономической точки зрения вести добычу нефти с подводных буровых вышек, устанавливаемых непосредственно на дне моря, то естественно, что потребность в количестве глубоководных аппаратов, обслуживающих их, заметно возрастает.
Основная часть подводных аппаратов, построенных в 60-х гг., используется для научных исследований в области океанографии, геологии, биологии, рыболовства и обследования районов промысла или подводных хозяйств и сооружений. Конечно, во многих случаях прибегают и к помощи водолазов, но считается, что работа водолазов эффективна на глубинах до 150 м, а ниже выгоднее использовать обитаемые подводные аппараты. Сегодня более 50 % всего эксплуатационного времени глубоководных аппаратов затрачивается на обслуживание морских нефтепромыслов, осмотр подводных трубопроводов и кабелей; около 20 % на укладку в грунт труб и кабелей, 12 % — на подводные и аварийно-спасательные работы и только 18 % — на биологические, геологические, океанографические и другие виды исследований океана, а также на контроль за загрязнением вод Мирового океана.
Всего в настоящее время во всем мире насчитывается несколько более 200 глубоководных подводных аппаратов. С каждым годом количество их возрастает, причем вновь создаваемые аппараты рассчитаны на использование их на больших глубинах и имеют большее водоизмещение, чем их предшественники.
Все подводные аппараты подразделяются на две категории: обитаемые (ОПА) и необитаемые (НПА), т. е. телеуправляемые — управляемые на расстоянии.
Как это ни покажется странным, но вначале появились автономные подводные аппараты для изучения предельных глубин океана. Родоначальник таких аппаратов — швейцарский ученый и изобретатель профессор Огюст Пикар. Интересно, что к созданию своего первенца— батискафа (Батискаф —в переводе с греческого — обозначает глубинная лодка.) (ФНРС-П) он пришел, увлекаясь воздухоплаванием и занимаясь изучением космических лучей. В 1931 г. он построил стратостат «ФНРС-I» (названный так в честь бельгийской организации, финансирующей оба проекта) и в 1932 г. первым в мире поднялся на рекордную для того времени высоту 16300 м. Если стратостат поднимается ввысь благодаря легким газам — гелию и водороду, наполняющим его оболочку, то у батискафа эти функции выполняет бензин, который, как известно, значительно легче воды. Шесть отсеков батискафа «ФНРС-П» заполнялись 32000 л бензина, которые ему давали возможность всплыть в нужный момент. Сам аппарат представлял собой стальной корпус или подъемный резервуар, заполняемый бензином (иначе называемый поплавком) и подвешенную к нему стальную гондолу, способную выдержать давления на любой глубине Мирового океана. Сначала он был опробован на глубине 25 м, а затем без экипажа достиг глубины 1400 м. Однако его испытания выявили много конструктивных недоделок, и в 1953 г. был построен новый батискаф «ФНРС-П1», в котором в 1954 г. французские инженеры Жорж Уо и Пьер Вильм впервые в мире совершили погружение на глубину 4050 м.
Однако не этот батискаф навсегда увековечил имя создателя этих подводных аппаратов. В 1962 г. профессор Огюст Пикар и его сын Жак приняли предложение города Триеста сконструировать батискаф, который должен был носить имя этого города. Он строился одновременно с «ФНРС-III», но не во Франции, а в Италии и конструктивно мало чем отличался от своего французского «собрата». Корпус «Триеста» имел цилиндрическую форму, разделенную на 12 отсеков, вмещавших 86 000 л бензина. «Триест» совершил множество погружений на глубины до 3700 м. На «Триесте» с улучшенной моделью гондолы, сделанной из специальной высокопрочной легированной стали, 23 января 1960 г. сын профессора Пикара — Жак Пикар и лейтенант военно-морских сил США Дон Уолш после пятичасового спуска достигли дна Марианской впадины — самой глубокой впадины Мирового океана.
В дальнейшем «Триест» использовался военно-морским ведомством США, которое приобрело этот аппарат у О. Пикара для различных целей, в том числе и для поисков затонувшей американской атомной подводной лодки «Трешер».
Всего на «Триесте» было совершено более 100 погружений.
Жорж Уо и Пьер Вильм сконструировали и построили в 1961 г. новый батискаф «Архимед», похожий и по устройству и по внешнему виду на «ФНРС-III». На «Архимеде» в 1962 г. было совершено погружение у берегов Японии на глубину 9200 м. За 5 лет этот батискаф совершил 57 погружений в основном на глубины свыше 6000 м для изучения геологии, биологии, акустики больших глубин океана.
«Архимед» и по сей день является глубоководным аппаратом, способным достигнуть дна Мирового океана в любой его точке. Кроме него, ни один подводный аппарат не может взять на борт столько научной аппаратуры (на «Архимеде» размещается 4,5 т научного оборудования). Это очень надежный научно-исследовательски и глубоководный аппарат, отрицательные качества которого — его громоздкость и огромная масса (60 т без бензина) и достаточно дорогая его эксплуатация. С 1969 г. «Архимед» принадлежит французскому национальному центру по эксплуатации океанов.
Конечно, батискафы — прекрасное средство для изучения Мирового океана, но их отрицательные стороны о которых упоминалось выше, заставили инженерно-техническую мысль работать в направлении создания более легких, маневренных и главное — более дешевых в эксплуатации автономных подводных аппаратов. Кроме того, подавляющее большинство раз батискафы использовались только в научных целях и на глубинах свыше 6000 м, а ведь известно, что такие глубины занимают немногим более 2 % всей площади Мирового океана. Необходимо было создание более универсальных автономных подводных аппаратов и для меньших глубин. Первые такие аппараты стали появляться вначале 60-х гг. и в дальнейшем по мере развития науки и техники в 70-е гг. значительно возросло не только их количество, но и техническая оснащенность. По ряду экономических, политических и военно-стратегических причин США заняли ведущее место среди стран капиталистического мира в области исследования и освоения океанских глубин. Решающая роль принадлежала подводным аппаратам «первого поколения», появившимся в 60-х гг. Это были миниатюрные подводные лодки с двумя-тремя людьми на борту, обладавшие немалыми для того времени техническими и эксплуатационными возможностями. Представитель первого поколения подводных аппаратов — «Алвин», находящийся в строю и по сей день (рис. 7). Своим названием он обязан своему создателю — американскому океанографу Аллину Вайну. С момента его постройки в 1965 г. ни одна сколько-нибудь заметная американская глубоководная экспедиция не обходилась без участия «Алвина». Этот глубоководный аппарат почти универсален. Он применялся и для топографической съемки морского дна в районе широкого распространения железо-марганцевых конкреций, и для биологического, геологического и океанографического изучения морского дна; и для разведки полезных ископаемых; и для осмотра подводных кабелей и нефтепроводов, и для проведения испытаний приборов и конструктивных узлов. Но наиболее известной его операцией было обнаружение водородной бомбы, «потерянной» американцами близ Паломераса у берегов Испании. Именно «Алвин» первым обнаружил на глубине 700 м эту зловещую «сигару». Свою высокую надежность «Алвин» доказал более чем в 500 глубоководных погружениях. Его редкая для глуббководных аппаратов долговечность объясняется высокими маневренными качествами и удачной конструкцией, предвосхитившеи в основных чертах конструкцию подводных аппаратов, выпускаемых в настоящее время. В 1970 г он под вергся значительной модернизации, в результате чего рабочая глубина аппарата возросла почти вдвое и достигла 3600 м.
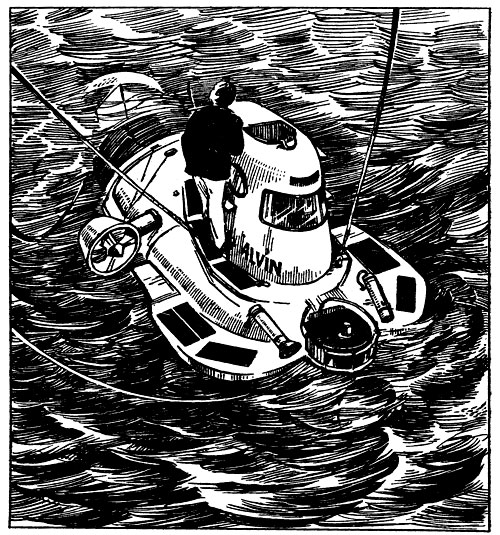
Рис.7. 'Алвин' на плаву.
После этого «Алвин» принял активное участие в исследовании Срединно-Атлантического рифта и в составе франко-американской океанографической экспедиции опускался в рифтовую зону 17 раз проведя под них является в общей СЛОЖНОСТИ более 80 ч. Одним из последних является рекордное погружение «Алвина» в 1976 г в океанскую впадину Кайман на глубину 3650 м.
По образцу «Алвина» созданы еще две подводные лодки «Сиклифф» и «Тартл». Столь же маневренные, они имеют еще более мощные гребные двигатели и в отличие от «Алвина» имеют не один, а два манипулятора.
Среди других американских подводных аппаратов необходимо сказать несколько слов о подводной лодке «Алюминаут». Эта лодка, построенная из прочных алюминиевых сплавов в 1964 г. и рассчитанная на экипаж 4—6 человек, широко использовалась для океанографических и геологических исследований, а также работ на грунте {изучение особенностей морского дна, сейсмических измерений, установки буровых устройств, укладки подводных трубопроводов, ремонта глубоководных кабелей, подъема затонувших устройств и т. д.). «Алюминаут» принимал также участие при поисках и подъеме затонувшей в 1966 г. у берегов Испании водородной бомбы. «Алюминаут» оборудован специальной гидроакустической, электронной, телевизионной аппаратурой и двумя манипуляторами, в результате чего может проводить самые разнообразные научные исследования и практические работы. Глубина погружения «Алюминаута» рассчитана на 4500 м. Сейчас «Алюминаут» переоборудуют для работ на глубоководных нефтегазовых месторождениях.
Весьма эффективен в работе и американский аппарат «Дип квест», рассчитанный на глубину погружения до 2000 м с экипажем из 4 человек. Это так же, как «Алвин^ очень маневренный аппарат, который имеет полезную нагрузку в 3 раза больше его и оснащен большим количеством научно-исследовательской аппаратуры. Так же, как и «Алвин», «Дип квест» используется для самых различных научно-исследовательских (например, он принес большую пользу при изучении подводных каньонов) и практических работ. «Дип квест» может поднять на поверхность груз массой 3,5 т.
Из других подводных аппаратов США можно назвать серию аппаратов «Стар» и «Дипстар», рассчитанных на разную глубину погружения: от 60 до 6000 м. Все эти подводные аппараты, построенные в 60-е гг., весьма маневренные, многоцелевые, причем в некоторых из них, как, например, в «Дипстаре-4000», в зависимости от цели спуска аппарата меняется и научно-исследовательская аппаратура.
«Дипстар-20000» (цифры обозначают глубину погружения в футах) — конкурент батискафов. При глубине погружения в 6000 м он имеет очень небольшое водоизмещение — всего 40 т (вспомним, что в батискафе «Триест-I» только в поплавки загружается 100 т бензина). «Дипстар-20000» стал первым беспоплавковым глубоководным подводным аппаратом.
В 1969 г. в США была построена для научно-исследовательских целей подводная лодка «NR-I», оборудованная малогабаритным атомным двигателем, способная погружаться на глубину 1050 м. По существу, она является примером научно-исследовательских судов ближайшего будущего. Ее экипаж, состоящий из 7 человек, имеет всю необходимую научную аппаратуру для многоцелевого исследования морских глубин. Но главное ее преимущество — возможность работать длительное время без всплытия на поверхность. Несмотря на то что создание ее обошлось почти в 100 млн. долларов, опыт ее успешной эксплуатации побудил ВМС США приступить к созданию второй такой подводной лодки с еще большей глубиной погружения.
Универсальное применение нашел подводный аппарат «Дип джип» — внешне напоминающий гигантскую медузу. Он сделан из лучших сортов стали, стекла и пластмасс и используется и для биологических и геологических исследований, а также для осмотра и устранения повреждений подводных нефтепроводов и буровых платформ. «Дип джип» погружается на глубину до 2000 м.
В 1969 г. замечательное плавание совершила научно-исследовательская подводная лодка «Бен Франклин», созданная по проекту Жака Пикара — покорителя Марианской впадины. Экипаж лодки под руководством Жака Пикара в течение 30 дней дрейфовал в подводном положении вместе с течением Гольфстрим, пройдя за это время расстояние 1600 миль от берегов Флориды до побережья Новой Шотландии, провинции Восточной Канады. Дрейф проходил на глубине 198 м, однако аппарат (или подлодка) совершил девять исследовательских погружений ко дну океана на глубину от 457 до 610 м. Эта научная дрейфующая лаборатория за 30 дней собрала богатейший научный материал, легший в основу фундаментальных работ.
Во Франции изучением вопросов Мирового океана занимается национальный центр по освоению океана. Он имеет обширную многолетнюю программу, охватывающую различные аспекты океанографического, биологического, геологического, экономико-географического изучения морей и океанов. Но задолго до образования этого центра французский океанограф Жак Ив Кусто построил свою миниатюрную подводную лодку «Дениз». С появлением «Дениз» в 1960 г. французские исследователи получили универсальный подводный аппарат, который по своей маневренности намного превосходит обычную подводную лодку. Сочетание черепахообразного корпуса и особого реактивного движителя обеспечивает аппарату полную свободу под водой. Он одинаково легко перемещается вперед и назад, вправо и влево, кружится вокруг своей оси, зависает над любой точкой и делает наклоны в необходимую сторону.
«Дениз» (или, как ее часто называют, «ныряющее блюдце Кусто») — участница большинства экспедиций Кусто. За свою многолетнюю эксплуатацию она совершила около 2000 погружений в разных морях. При своей высокой маневренности «Дениз» имеет великолепное научное, оборудование, позволяющее вести самые разнообразные исследования, фотографировать, собирать образцы донных пород, и при этом масса аппарата позволяет ею транспортировать в любую точку Мирового океана. По типу «Дениз», имеющей рабочую глубину погружения до 350 м и рассчитанной на экипаж из двух человек, были построены еще два подводных аппарата «Sp-500» (одноместные с глубиной погружения до 500 м), «Sp-3000» (трехместный с глубиной погружения 3000 м) и вышеупомянутый американский подводный аппарат «Дип стар-4000» (трехместный с глубиной погружения 1200 м). В проектировании всех этих аппаратов принимал участие Жак Ив Кусто.
Среди других французских подводных аппаратов необходимо отметить трехместный аппарат «Сиана», предг назначенный для исследований и работ на глубине до 3000 м. Он оборудован совершенными системами управления и связи, а также манипулятором, который может брать пробы грунта, работать гаечным ключом, резаком и другими инструментами. Это также очень маневренный и высокоэффективный многоцелевой подводный аппарат.
Кроме того, во Франции успешно эксплуатируются подводные аппараты «Шельф Дайвер» и построенные после 1970 г. «Гриффон», «Марко», «Глобюль», «Моана» и «Нерей».
Большинство этих аппаратов предназначено для обслуживания подводных нефтепромыслов и оснащено большими иллюминаторами, обеспечивающими круговой обзор, а также манипуляторами и сменными инструментами (пробоотборники грунта, захваты, резаки, насадки для завертки гаек и т. п.).
В Великобритании в связи с интенсивным освоением богатых месторождений нефти и газа только в 1977 г. нефтяные промыслы обслуживали 11 подводных аппаратов. В основном эти аппараты типа «ПК» предназначены для работ на глубине до 300 м. Это высокоманевренные аппараты, последние модели которых имеют прозрачную носовую часть, трехместную водолазную камеру и два манипулятора с набором сменных инструментов: дрели, гайковерты и т. п. Один манипулятор служит для закрепления аппарата на каком-либо подводном неподвижном сооружении, а второй — для выполнения рабочих операций.
Начиная с 1972 г. фирмы ФРГ строят подводные аппараты типа «Мермейд» и «Тоурс». Аппараты «Мермейд» почти такие же, как последние модели подводных аппаратов «ПК-18». Они предназначены также для обслуживания нефтепромыслов в Северном море и рассчитаны на работу до глубины 500 м. Такие аппараты имеют водолазный отсек, рассчитанный на четырех человек, и оборудованы буровыми установками для бурения скважин глубиной 200 м.
Аппарат типа «Тоурс» представляет собой подводную лодку с глубиной погружения до 500 м, скоростью под водой 11 узлов и автономностью плавания 14 суток. Эта подлодка также выпускается для работ в Северном море.
В Японии были построены научно-исследовательские подводные аппараты «Ио-мури» (экипаж — 6 человек, глубина погружения — 300 м); «Синкай» — глубина погружения 600 м и очень удобный маневренный аппарат «Хакио», способный работать на глубине до 300 м; ;ф, наконец, «Удзусио» с прозрачным корпусом, глубища погружения до 200 м.
В разработке месторождений Северного моря и создании подводных аппаратов по обслуживанию нефтепромыслов принимают участие и Норвегия и Нидерланды. В создании подводных аппаратов участвует также Швеция.
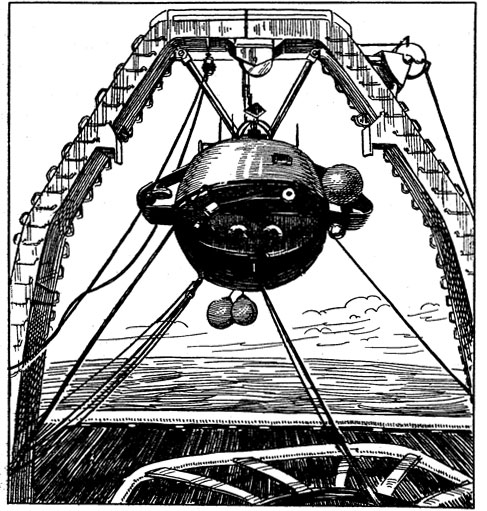
Рис. 8. Спуск на воду французской подводной локи 'Сиана'.
В Канаде разработана большая программа исследования и освоения ресурсов Мирового океана, включая и арктические районы. Для реализации этой программы канадская фирма «Интернейшнл Хайдродапнемикс» выпускает подводные аппараты «Пайсис», получившие мировое признание. Это небольшие, очень компактные и маневренные аппараты самого широкого профиля примёнения с глубинами погружения 1000 и 2000 м. Они используются и для научно-исследовательских целей, и для обслуживания нефтепромыслов, и для подводных работ по укладке кабелей, и для проведения различных спасательных операций. Два таких аппарата «Пайсис-VII» и «Пайсис-XI» были приобретены Академией наук СССР. Они отлично зарекомендовали себя при испытаниях на Черном море, а также во время работ на озере Байкал, где они погружались летом 1977 г. на глубину 1450 м; в Тихом и Индийском океанах, а также при исследовании рифтовой зоны Красного моря в конце 1979 - начале 1980 г. (рис. 9).
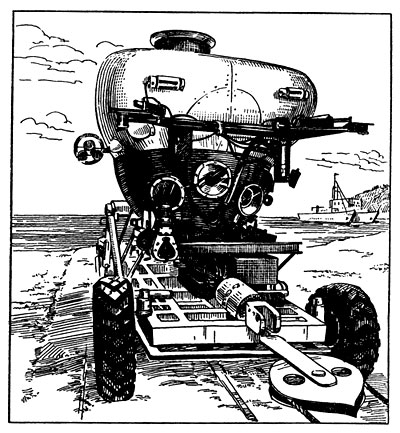
Рис.9. Канадский подводный аппарат 'Пайсис'.
Во время экспедиции в Красное море «Пайсис» 29 раз погружался в море, где провел под водой более 163 часов. За это время были записаны видеомагнитофонные фильмы, сделано большое количество подводных фотографий, собраны образцы базальтовых лав общей массой более тонны, взяты пробы воды и т. п. Если же учесть, что исследовалась рифтовая зона, где, по мнению большинства специалистов, формируется новая океаническая земная кора, то можно представить, какое большое значение имела эта экспедиция. За очень короткий срок был получен ряд уникальных результатов именно за счет использования в комплексных исследованиях нескольких типов подводных аппаратов (кроме «Папсиса» использовались также необитаемые телеуправляемые аппараты, о которых речь пойдет ниже). Эта экспедиция показала, что использование подводных аппаратов значительно повышает эффективность морских геологических исследований. Если раньше приходилось вслепую спускать на дно морей и океанов драги и грунтовые трубки в надежде захватить какие-нибудь образцы, то теперь с применением подводных аппаратов получена возможность работать почти как на суше, перемещаться у поверхности дна в нужных направлениях, подробно рассматривать дно, фотографировать, записывать видеомагнитофонные фильмы и брать манипулятором нужные образцы.
В СССР до 60-х гг. подводные исследования выполнялись, как уже отмечалось, с помощью подводной лодки «Северянка» и гидростата «ГКВ-6». В 60-е годы к ним прибавились буксируемый подводный аппарат «Атлант-1» и глубоководный «Север-1». В 70-е годы были созданы более совершенные подводные аппараты «Север-2» — глубина погружения до 2000 м; ТИНРО-2 — глубина погружения до 400 м; двухместный буксируемый аппарат «Атлант-2»; двенадцатиместная подводная лаборатория «Бентос-300», способная опускаться до глубины 300 м; трехместная «Оса-3» — глубина погружения до 600 м. В эти же годы Институт океанологии АН СССР построил подводный аппарат «Аргус», а Дальневосточный университет — двухместный аппарат «Шельф» — глубина погружения 300 м. Они предназначены для научных исследований в области геологии, биологии и океанографии.
Подводный аппарат «Север-2» принадлежит ПИНРО (Полярному научно-исследовательскому институту рыбного хозяйства и океанографии). Помимо применения его для нужд рыбного хозяйства, он может использоваться при обнаружении и подъеме различных затонувших объектов. Аппарат имеет большую маневренность и способен зависать над нужной точкой. Он хорошо оснащен разнообразной научной аппаратурой, может вести фото-и киносъемку на любой глубине (до 200 м). Он имеет автоматическую систему управления, что представляет большое удобство при экипаже в два человека, так как дает возможность в это время проводить другие научные измерения.
ТИНРО-2 — подводная лодка, названная по имени Тихоокеанского научно-исследовательского института рыбного хозяйства и океанографии, хотя и обслуживает ученых-ихтиологов, удобна для проведения и океанографических и геологических исследований. «Бентос-300» представляет собой хорошо оборудованную научную лабораторию, созданную конструкторами ленинградского института «Гипрорыбфлот». Экипаж самоходной автономной лаборатории состоит из четырех человек команды, семи океанологов и врача-физиолога. Экипаж размещается в комфортабельных уютных каютах, а научное оборудование включает самую разнообразную аппаратуру, теле-, кино- и фотоустановки, в «Бентосе» предусмотрен специальный шлюз, через который исследователи отправляются в путешествие по морскому дну.
Один из самых интересных советских подводных аппаратов — «Оса-3» (обитаемый стабилизированный аппарат, рассчитанный на экипаж три человека и глубину погружения до 600 м, см. рис 10). «Оса-3» еще более подвижный и маневренный аппарат, чем «Дениз». Он, не разворачиваясь, легко и свободно перемещается вперед-назад, вверх-вниз, влево-вправо по борту, легко неподвижно зависает в одной точке независимо от силы течения. Это достигается за счет оснащения «Осы-3» системой автоматического управления — ценной новинкой, которая отсутствовала в других советских подводных аппаратах. Кроме того, «Оса-3» имеет четыре мощных движителя, за счет которых и обеспечивается повышенная маневренность. Система регенерации воздуха почти аналогична той, какая имеется на космических кораблях. В комплект научной аппаратуры входят теле-, кино- и фотоустановки, гидролокатор бокового обзора, позволяющий наблюдать подводную обстановку не только впереди, но и вокруг всего аппарата. В случае необходимости обзор подводного положения осуществляется через перископ.
В последнее десятилетие появились и начали использоваться подводные аппараты с водолазными отсеками: один для экипажа с нормальным атмосферным давлением, другой — для водолазов, где поддерживается повышенное давление. Водолазы выходят из подводного аппарата в специальном снаряжении и работают необходимое время. После возвращения водолазов водолазный отсек герметически закрывается и, закончив подъем подводного аппарата на борт обеспечивающего судна, стыкуется с судовой декомпресснонной камерой, в которой водолазы отдыхают и проходят декомпрессию.
Обычно такие подводные аппараты имеют рабочую глубину погружения до 300 м, так как на большей глубине работать водолазам опасно для жизни. К таким аппаратам относятся американские аппараты «Джонсон си Линк», «Дип Дайвер» и ряд других.
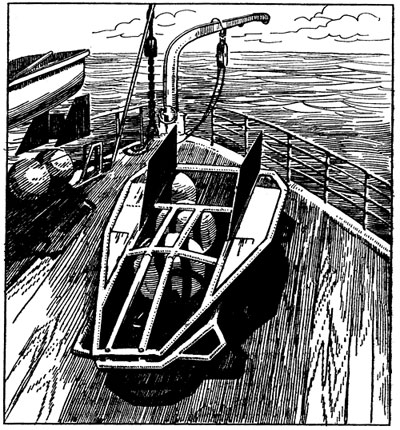
Рис.10. Советский подводный аппарат 'Оса-3-600'.
Выше мы упомянули об обеспечивающем судне. Действительно, большинство глубоководных аппаратов неразрывно связано с судами-носителями этих аппаратов. Эти суда транспортируют подводные аппараты к месту погружения, спускают их на воду и поднимают на борт после проведенной под водой работы. Судно-носитель вместе с подводным аппаратом как бы составляет единую систему. Примеры таких систем: судно «Лулу» и аппарат «Альвин», судно «Калипсо» Жака Ив Кусто и аппарат «Дениз», судно «Одиссей» и аппарат «Север-2».
В связи с высокой стоимостью постройки и эксплуатации обитаемых подводных аппаратов, а также для того, чтобы избежать любого риска для жизни людей, работающих в этих аппаратах, предпринимаются попытки по мере возможности заменить их аппаратами без экипажа. Это необитаемые, или, как их чаще называют, телеуправляемые подводные аппараты (так как в большинстве случаев они соединяются с надводным судном кабель-тросом).
Они бывают буксируемыми и самоходными. Первые передвигаются под водой при движении надводного судна, а вторые имеют собственные гребные винты с электромоторами, получающими электроэнергию с надводного корабля по кабелю. Они способны самостоятельно маневрировать в различных направлениях и плоскостях, но, естественно, в пределах длины кабель-троса. Телеуправляемые подводные аппараты оснащены телевизионными системами, гидролокаторами, различными океанографическими приборами, а в ряде случаев и манипуляторами. Эти аппараты могут значительно дольше, чем обитаемые подводные аппараты, находиться под водой, более быстроходны, а в ряде случаев и более маневренны, и, что самое важное, их создание и эксплуатация обходятся во много раз дешевле.
Первые телеуправляемые подводные аппараты в основном создавались для поисков различных затонувших объектов. Так, подводный аппарат «КЭРВ-1» с глубиной погружения 600 м еще в 1966 г. участвовал вместе с «Альви-ном» и «Алюминаутом» в поисках затонувшей водородной бомбы у берегов Испании. Успешные его действия в этой поисковой и в ряде других операций, в частности при подъеме затонувших торпед, привлекли внимание к этому типу подводных аппаратов и в значительной степени способствовали их дальнейшему развитию и усовершенствованию.
Все подводные телеуправляемые аппараты оснащены современной научно-исследовательской высокочувствительной аппаратурой, а в ряде случаев и специальными инструментами для решения конкретных практических задач. Так, например, ПТА «КЭРВ-III», оснащенный двумя телевизионными камерами, мощными подводными светильниками, тремя манипуляторами, источником энергии и набором рабочих инструментов, во время одного из испытаний приблизился к затопленному самолету, вскрыл манипуляторами обшивку корпуса и извлек оттуда ящик с магнитофонной записью переговоров.
Затем аппарат прикрепил к этому устройству баллон, автоматически заполнившийся газом, и груз всплыл на поверхность, где был подобран надводным кораблем.
Многие аппараты предназначены для обслуживания нужд морских нефтепромыслов. Причем, как показал опыт эксплуатации, ряд их справляется с поставленными перед ними задачами не хуже, чем обитаемые подводные аппараты с экипажем на борту. Так, они с успехом выполняют такие работы, как осмотр и ремонт подводных нефтегазопроводов, а также телефонных кабелей. Особенно широкое применение они нашли на нефтяных промыслах в Северном море и Мексиканском заливе. Интересен универсальный аппарат «Скараб». Он применяется и при подводных геологических и биологических исследованиях, и при ремонте кабелей и нефтегазопроводов, и при обследованиях различных сооружений на морском дне, и при поисковых и спасательных операциях. Аппарат может зарывать кабель в донный грунт со скоростью 150 м в час. Рабочая глубина погружения у него 1830 м.
ПТА «Рекон-IV» отличается от других аппаратов тем, что имеет собственный «гараж», с которым он и опускается на рабочую глубину, после чего он выходит из «гаража» и работает в радиусе 120 м от него на вторичном кабеле, передающем электроэнергию и управляющие команды. Этим достигается более точное управление аппаратом и соответственно выполнение более тонких работ.
Аналогично устроен и аппарат RCV, оснащенный телекамерой с особой высокочувствительной оптикой, получающей изображения практически без освещения на расстоянии до 9 м.
Манипуляторы со сменными рабочими инструментами позволяют выполнять самые разнообразные практические операции.
Очень успешно во время советской экспедиции по изучению рифтовой структуры Красного моря (о которой упоминалось выше) вместе с обитаемым подводным аппаратом «Пайсис» проявили себя отечественные ПТА «Манта-1,5», «Звук-4», «Звук-4м» и «Звук-6». Последние три аппарата оснащены системами многокадрового подводного фотографирования, телевизионными системами (с передачей изображения по кабелю на борт судна и его записью на видеомагнитофон), гидроакустической системой, и локаторами бокового обзора. На ПТА «Манта-1,5», помимо телевизионной системы и системы подводного фотографирования и манипулятора, были установлены винтовые движители, которые позволяют аппарату в течение длительного времени плавать над дном, зависать над ним и садиться у объекта исследования. Всего в этой экспедиции было проведено более 30 погружений ПТА, во время которых сделано около 3000 фотографий дна, записаны видеофильмы продолжительностью 5 ч и проделано много другой очень полезной и разнообразной работы.
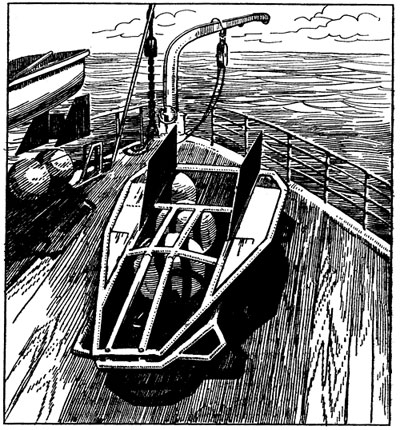
Рис. 11. Буксируемый подводный аппарат типа 'Звук'
Создание ПТА больших глубин стало возможным лишь благодаря последним достижениям кабельной технологии, позволяющей сегодня выпускать очень прочные, эластичные и в то же время достаточно легкие кабель-тросы. Так, один из самых совершенных ПТА, созданных в последние годы Военно-морским ведомством США «РУВС», имеет длину кабель-троса более 6 км. Благодаря применению особых синтетических материалов прочнее стали и удалось получить относительно приемлемую массу кабель-троса — около 8 т (при массе самого аппарата около 2,5 т). Аппарат оснащен телевизионной камерой, гидролокатором, киноаппаратом, двумя манипуляторами и подводными прожекторами. Оператор у пульта на надводном корабле надевает на голову специальный шлем с вмонтированным на уровне глаз миниатюрным телевизионным экраном. Поворотом головы он изменяет положение телекамеры на аппарате. Этим создается впечатление «присутствия» оператора на месте движения аппарата. Совершенствование методов передач информации, телевизионных изображений и управляющих команд по гидроакустическим каналам дало возможность приступить к созданию полностью автономных необитаемых аппаратов, т. е. не связанных кабелем с надводным кораблем.
Выше уже говорилось о том, что 82 % всего рабочего времени подводные аппараты используются для выполнения чисто практических задач, таких, как обслуживание морских нефтепромыслов, осмотр и ремонт подводных нефтегазопроводов, укладка и ремонт подводных кабелей связи и т. п. Естественно, что использование только подводных аппаратов, при их ощутимой нехватке практически на большинстве морских нефтегазоразработок, не может полностью успешно разрешить поставленные перед ними задачи. Кроме того, очень дорого получается доставлять водолазов регулярно для всех этих практических подводных работ. На помощь подводным аппаратам пришли глубоководные гипербарические лифты и палубные барокамеры. Вместе они образуют своеобразный гипербарический комплекс. Создание таких комплексов стало возможно лишь после того, когда в начале 60-х гг. был открыт и практически опробован так называемый «эффект насыщения». Выше упоминалось о необходимости водолазов, побывавших на глубине, проходить декомпрессию, причем время ее определяется глубиной погружения водолазов и временем, проведенным на глубине (чем больше глубина погружения и время пребывания на глубине, тем больше необходимо времени на декомпрессию). В основе «эффекта насыщения» лежит следующее физическое явление: в условиях повышенного давления ткани человеческого организма, как и любые жидкости, могут растворять инертный газ не безгранично, а только до определенного предела, соответствующего полному насыщению при данном давлении. В случае длительного пребывания человека в таких условиях количество растворенного в организме газа, достигнув в какой-то момент насыщения, уже не будет увеличиваться и, следовательно, время необходимой декомпрессии с этого момента перестает возрастать.
Вот когда и стало возможным посылать водолазов на длительные работы по монтажу подводных частей буровых вышек, ремонту подводных нефтегазопроводов и т. д.
При использовании гипербарических комплексов водолазы длительное время живут в специальной барокамере, расположенной на судне, где поддерживается постоянное повышенное давление, равное давлению воды на рабочей глубине. Здесь созданы все условия для нормального отдыха. По мере надобности (чаще всего не более двух раз в сутки) они переходят в глубоководный лифт, герметично соединенный с судовой барокамерой и имеющей внутри давление, равное давлению в отсеках барокамеры. После чего закрываются переходные люки и лифт отсоединяется от барокамеры и опускается на рабочую глубину, где водолазы открывают люк и выходят в воду. После окончания рабочего времени водолазы (это могут быть специалисты самого различного профиля) возвращаются в лифт, вновь закрывают люк, лифт поднимаете» на поверхность, стыкуется с судовой барокамерой и водолазы переходят в нее для отдыха. Так может продолжаться дни и недели — до тех пор, пока работа на дне не будет закончена, и только после этого водолазы один раз проходят декомпрессию. Ясно, что при подобной методике проведения подводных работ экономится огромное количество времени, которое необходимо было бы, если бы водолазы после каждого спуска на глубину проходили декомпрессию. Сейчас в СССР, США, Франции, Великобритании, ФРГ, Италии и Японии существуют гипербарические комплексы, позволяющие работать на глубине, которую только способен выдержать организм человека. Как показывают опыты последних лет, в береговых гипербарических комплексах успешно моделируются «опускания» акванавтов на глубину 560 и даже 610 м. По мнению исследователей, не за горами и то время, когда появятся специальные дыхательные смеси, которые дадут возможность покорить человеку 1000-метровую глубину.
Однако ни погружения на обитаемых подводных аппаратах, ни погружения в гипербарических комплексах не могут заменить длительное изучение человеком доступных морских глубин. Океанографические, геологические, биологические, медико-физиологические, технические и многие другие задачи решаются с помощью еще одного направления покорения морских глубин — научных лабораторий на морском дне. Прошло почти двадцать лет со времени организации первой подводной лаборатории, и несмотря на то что за это время не так много подобных исследований было осуществлено в различных странах мира, научный вклад таких подводных исследований трудно переоценить.
Пионерами этого нового направления изучения подводного мира можно считать американского инженера Эдвина Линка и всемирно известного французского океанографа Жака Ив Кусто. В августе 1962 г. близ французского порта Тулон Эдвин Линк спустил на воду и испытал подводное жилище своей конструкции на небольших глубинах до 18 м. А в сентябре этого же года бельгийский аквалангист Робер Стенюи опустился в этом подводном доме на глубину 60 м и пробыл в нем сутки. Он дышал специальным «коктейлем», состоящим из 95 % гелия и 3,5 % кислорода. Декомпрессия протекала еще двое суток, так что в общей сложности Стенюи пробыл в своем подводном жилище более трех суток.
Почти одновременно со Стенюи была совершена еще одна успешная попытка обжить глубины Средиземного моря. Подводный дом, построенный по проекту Жак Ив Кусто и названный «Диогеном», установленный на глубине 10 м, заселили два французских акванавта. В течение семи суток они жили в своем удобном «Диогене», где имелись две кровати с инфракрасными грелками, стол, стулья, телевизор, радиоприемник и электроплита. Эта экспедиция, получившая название «Преконтинент-1», так же как и эксперимент Линка и Стенюи, показала, что человек может жить и успешно трудиться под водой. С тех пор было организовано более 50 подводных лабораторий разными странами, на разных глубинах, многие из которых были весьма продолжительными. Но какие бы ценные научные материалы не были получены в этих экспедициях, всегда следует помнить о том, что они стали возможны только после того, как был проторен путь к нормальной жизнедеятельности в морских глубинах американской экспедицией Линка и французской экспедицией Кусто.
Следующая экспедиция Кусто — «Преконтинент-2» — состоялась летом 1963 г. в лагуне рифа Шаб-Руми в Красном море, в 25 милях к северу от Порт-Судана. Кусто умышленно выбрал место с очень тяжелым жарким и влажным климатом, отдаленное от населенных пунктов, где рассчитывать на помощь с берега было невозможно. Он считал, что если экспедиция пройдет успешно, то можно будет проводить подобные эксперименты в любом уголке земного шара.
Под водой на глубине 11м была установлена основная лаборатория «Морская звезда» — жилое пятикомнатное помещение в форме 4-лучевой звезды, заселенное 7 акванавтами, двое из которых несколько позже перешли в маленький двухэтажный домик «Ракета», расположенный на глубине 27,5 м. В этом же подводном эксперименте участвовала и миниатюрная подводная лодка «Дениз». Акванавты могли входить в лодку и покидать ее, не поднимаясь на поверхность моря. Рядом с домом-звездой находился подводный гараж для «Дениз». Кроме того, имелся в подводной деревне и склад, где хранилось необходимое для акванавтов оборудование и различные инструменты. Особенно тяжелые условия пришлось перенести акванавтам в маленьком доме «Ракета», где отсутствовали кондиционеры и поэтому постоянная температура воздуха держалась около +30° при почти 100 %-ной влажности. Спасали только выходы в гидрокосмос и работа на глубине 40—50 м, а иногда 90—100 м. Во время этой экспедиции акванавты проводили систематические наблюдения за обитателями моря, изучая их привычки и образ жизни, а также занимались сбором геологических образцов и различными биологическими исследованиями.
Во время экспедиции «Преконтинент-2» акванавты провели под водой около месяца (а жители «Ракеты» — неделю).
Самым важным достижением этой экспедиции, по словам Кусто, было захватывающее дух сознание, что шельф стал средой обитания человека.
Сразу после окончания этой замечательной экспедиции Жак Ив Кусто начал готовиться к следующей.
Подводный дом «Преконтинент-3» представлял собой огромный шар, смонтированный на лафете с четырьмя опорами. Он был установлен в прибрежных водах княжества Монако уже на глубине 110 м. Внутри дома был предусмотрен максимум удобств, включая постоянную ровную температуру и постоянную умеренную влажность воздуха. Данные по наблюдениям акванавтов (на этот раз их было 6 человек), а также о самочувствии членов эксперимента и постоянстве воздушной среды внутри дома непрерывно обрабатывались с помощью электронно-вычислительной машины и тут же передавались на поверхность. Телевизионные камеры, установленные внутри дома и на поверхности, обеспечивали постоянную круглосуточную связь с акванавтами. Основные работы акванавтов были направлены на опытный монтаж нефтяной вышки и ремонтные работы, которые могли бы встретиться при эксплуатации нефтяной вышки. Приглашенные инженеры-нефтяники дали высокую оценку работам, проведенным акванавтами. Три недели продолжалась экспедиция «Преконтинент-3». После окончания экспедиции Жак Ив Кусто отметил, что ее участники показали на деле возможность проводить производственные работы на глубине свыше 100 м, жить и плодотворно трудиться на такой глубине. Cледует заметить, что экспедиция «Преконтинент-3» финансировалась нефтепромышленниками Франции.
Почти одновременно с французскими исследователями в США была принята обширная программа подводных исследований «Человек в море», в результате которой должна была быть подготовлена методика глубоководных работ с использованием вышеупомянутого «эффекта насыщения», которую можно будет применять для промышленных целей. На год раньше французских исследователей акванавты США Эдвин Линк, Робер Стенюи и Джон Линдберг покорили 100-метровую глубину, прожив двое суток в подводном доме из прорезиненного нейлона, опущенном на глубину 132 м в районе Багамских островов. Основная цель этого погружения — наблюдения за психико-физиологическим состоянием акванавтов. Затем последовали две крупные американские экспедиции «Силэб-1» и «Силэб-2».
Экспедиция «Силэб-1», что в переводе с английского означает «Морская лаборатория № 1», проводилась в июне 1964 г. в районе Бермудских островов. В «Морской лаборатории», установленной на глубине 59 м, 4 акванавта прожили 11 дней, занимаясь различными работами (фотографирование, отбор проб грунта, наблюдения за животным миром и т. п.). Но основной целью эксперимента, так же как и в предыдущем погружении, были медицинские наблюдения за состоянием акванавтов.
Более значительный вклад в науку сделала последующая американская экспедиция «Силэб-2». Общее руководство экспедицией осуществлял Джордж Бонд. Подводная лаборатория была установлена в августе 1965 г. у побережья Калифорнии на глубине 60 м. Эта лаборатория была рассчитана на одновременное в ней проживание сразу 10 акванавтов. Всего в этом эксперименте участвовало три группы акванавтов по 10 человек, причем каждая группа провела в подводной лаборатории по 15 дней, а. один из участников — американский космонавт, Скотт Карпентер, член космического экипажа на орбитальном корабле «Джеминай-V» — пробыл в подводной лаборатории «Силэб-2» целый месяц. Во время очень насыщенной программы исследований акванавты выполнили более 40 различных заданий, среди которых первостепенное значение придавалось всевозможным монтажным и пробным строительным работам на дне океана (в том числе был проведен и подводный монтаж буровой установки). Собран также богатейший научный материал по результатам биологических, геологических и океанографических наблюдений. В этом эксперименте акванавтам активно помогал и знаменитый дельфин Таффи, о котором рассказывалось выше. Эта экспедиция финансировалась Военно-морским ведомством США.
В СССР исследования с использованием длительного пребывания человека под водой начались в конце 60-х гг. Почти одновременно возникли и начали разрабатываться три программы подводных исследований с применением подводных лабораторий — «Ихтиандр», «Садко» и «Черномор».
Акванавты из Донецка из подводного клуба «Ихтиандр» первыми в СССР построили дом под водой и поселились в нем летом 1966 г. Два человека прожили около четырех суток на глубине Юму берегов мыса Тарханкут, на Южном берегу Крыма.
В 1967 г. эксперимент «Ихтиандр» был продолжен у берегов Севастополя.
Главная цель экспедиции «Ихтиандр-67» выяснить, как влияет повышенное давление на организм человека. Экипаж «Ихтиандра» на собственном опыте должен был проверить, можно ли жить и работать под водой в течение длительного времени. Акванавты занимались умственным и физическим трудом. Они пилили ножовкой железные трубы, переносили грузы массой 100—120 кг, проводили геологические изыскания на дне моря. По вечерам они обрабатывали результаты лабораторных исследований, решали психологические тесты, вели дневники.. Все испытания прошли успешно.
В течение 14 суток акванавты выполнили обширную медико-психологическую программу исследований. Были проведены также гидрологические и геологические исследования.
Эксперимент «Ихтиандр» был успешно продолжен и в 1968 г.
Почти одновременно с программой «Ихтиандр-66» у берегов Кавказа, на дне Сухумской бухты на глубине 12 м поставили подводный дом и акванавты Ленинградского гидрометеорологического института, назвав его «Садко». Первыми жителями «Садко» стали два кролика и собака, которые «погостили» в подводном доме два дня, после чего еще сутки находились в барокамере. Затем пришла очередь акванавтов.
В «Садко» по 6 ч. побывали 8 экипажей по 2 человека, Акванавты оставляли подводный дом и спускались на глубину 45 м.
В 1967 г. в Сухумской бухте появился усовершенствованный вариант подводного дома «Садко-2», который был сначала установлен на глубине 11 м, затем, обжив подводный дом, акванавты вместе е ним переместились на глубину 25 м.
В 1969 г. был продолжен подводный эксперимент уже с «Садко-3». Внешний вид его напоминал трехступенчатую космическую ракету. В нижней ступени помещался водолазный отсек, в средней — жилая комната и камбуз, а в третьей — верхней — научная аппаратура. «Садко-3» был установлен на глубине 25 м. Конструкция «Садко-3» заметно отличалась от предыдущей модели. «Садко-3» не нужно было опускать и поднимать е помощью лебедки. Он был снабжен специальными балластными цистернами, позволяющими опускаться и всплывать самостоятельно. В первый экипаж «Садко-3» входили главный конструктор подводного дома Всеволод Джус, инженер по электронному оборудованию Александр Монкевич и водолаз Джон Румянцев. Они пробыли под водой трое еуток, после чего перешли в водолазный колокол, который был поднят на поверхность моря и состыкован е береговой декомпрес-сионной камерой. На смену первому экипажу пришел новый. Основная работа акванавтов заключалась в изучении и записи на пленку голосов обитателей подводного царства. Проводились и другие биологические и гидрофизические наблюдения, а также «пробивались специальные продукты, приготовленные по рецептам Всесоюзного научно-исследовательского института консервной и овощесушильней промышленности. Проводились и медико-физиологические исследования. Эксперимент «Садко-3» внес весьма существенный научный вклад в дело покорения морских глубин.
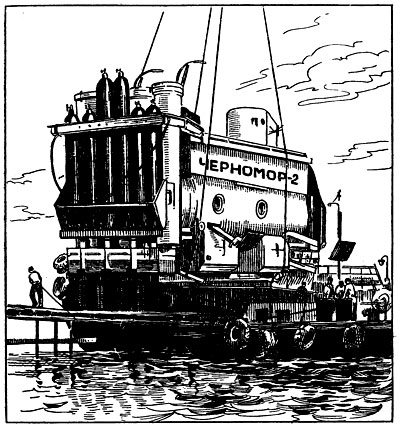
Рис.12. Подводная лаборатория 'Черномор-2'.
Особого внимания заслуживает программа «Черномор». В отличие от других подводных домов, снабжение которых энергией и воздухом всегда было наиболее узким местом в системе обеспечения, «Черномор» был рассчитан на многодневную независящую от поверхности нормальную эксплуатацию. Лаборатория располагала аккумуляторами я большим запасом сжатого воздуха. Так же, как и в «Садко-3», водяная балластная система позволяла производить автоматическое всплытие и погружение.
Первое погружение «Черномора» состоялось летом 1968 г. в Голубой бухте Черного моря, близ Геленджика Дом был опущен на глубину 14 м. В весьма обширной и разнообразной научной программе «Черномора» трудились и гидрофизики, и геологи, и биологи. 5 экипажей, объединенных научными интересами, работали в лаборатории, сменяя друг друга. Члены этих экипажей провели под водой в общей сложности около 100 дней.
В июле 1969 г. усовершенствованная и модернизированная модель «Черномора» — «Черномор-2» (рис. 12) — снова была спущена на дно Голубой бухты на глубину 31 м. Значительно возросли запасы воздуха, а также запасы пресной воды. Увеличилась также мощность аккумуляторов. Научная программа снова предусматривала комплексные океанологические, геологические и биологические исследования. Геологи изучали перемещение донных отложений и с помощью пневматического бура проводили опытное ручное бурение. Биологи проводили исследования по экологии и поведению рыб, а гидрофизики занимались изучением турбулентности водной среды и ее освещенностью.
Вблизи «Черномора-2» работали и два акванавта в надувной подводной лаборатории «Спрут». Эта лаборатория представляла собой прорезиненную палатку каплеобразной формы высотой 1,8 м. Закрытая снизу, она наполняется дыхательной смесью, которая подается через шланг с поверхности. Она действительно внешне очень похожа на спрута, чем и вызвано ее название. Эта лаборатория весьма портативна и легко устанавливается на морском дне в течение 1,5 ч.
В 1971 г. лаборатория «Черномор-2» была снова усовершенствована, стала полностью автономной, т. е. независимой при ее эксплуатации от надводной базы или надводного судна.
После этого «Черномор-2М» так теперь называлась эта лаборатория — участвовал во многих погружениях в Голубой бухте, а в 1973—1974 гг. подводная лаборатория и ее судно обеспечения принимали участие в совместной болгаро-советской экспедиции «Шельф-Черномор». Работы проводились в территориальных водах Болгарии, южнее порта Бургас на глубине 18—19 м.
Экспедиционный сезон 1974 г. был последним для подводной лаборатории «Черномор». За годы безотказной «службы» с 1968 по 1974 г. на борту «Черномора» отработало 12 научных экипажей, в составе которых находи лось более 40 акванавтов различных специальностей; в общей сложности они провели под водой более 760 дней.
В 1975 г. «Черномор-2М» был передан морскому музею в болгарском городе Варна, став одной из его реликвий. В историю покорения морских глубин советскими учеными «Черномор» внес наиболее весомый научный вклад.
Чтобы получить представление о размахе подобных исследований за рубежом, достаточно кратко указать на географию таких экспериментов. СССР, США, Франция, Великобритания, Чехословакия, Болгария, Куба, Польша, ГДР, ФРГ, Италия, Канада, Япония — вот далеко не полный список стран — участниц подводных исследований такого типа.
В этих экспериментах проводились различные исследования как теоретического (медико-психологические, океанологические, геологические, биологические и т. п.), так н практического характера (отработка методики аварийно-спасательных работ, или опытные подводно-техни-ческие работы, направленные прежде всего на обслуживание подводных нефтегазопромыслов). Проводившиеся эксперименты показали, что длительное пребывание человека под водой возможно без ущерба для его здоровья (рекорд длительности пребывания под водой принадлежит американским исследователям, которые во время программы «Тектит-1» в 1969 г. в составе экипажа из четырех человек находились под водой непрерывно в течение 59 дней, имитируя сходные условия пребывания в космическом корабле). Более того, американские специалисты подсчитали, что эффективность акванавтов, которые проводят практические работы на глубине 60 м, находясь в подводной лаборатории, в 30 раз выше, чем эффективность свободно погружающихся плавающих водолазов.
Таким образом, наметилось два основных направления практического покорения морских глубин: использование подводных обитаемых и телеуправляемых аппаратов и подводных лабораторий стационарного типа.
Отдать предпочтение какому-либо из этих направлений без учета практических задач, стоящих перед исследователями, было бы неправильно. Разумное сочетание обоих этих направлений — вот по какому пути будет проходить дальнейшее покорение морских глубин
|
ПОИСК:
|
При использовании материалов сайта активная ссылка обязательна:
http://nplit.ru/ 'Библиотека юного исследователя'